扩散模型(Diffusion models) [draft]
Beijing, China: 🌦 🌡️+32°C 🌬️←19km/h
🗒️ 写在前面
本文旨在对 扩散模型(Diffusion Model) 进行系统性概述,介绍其基本原理、核心流程以及与之相关的部分数学推导。通过对正向扩散过程(forward process)与逆向生成过程(reverse process)的解析,帮助读者建立对扩散模型工作机制的整体认识,并为后续深入理解其在图像生成、语音建模等任务中的应用打下基础。
GAN 模型因其对抗性训练性质,在训练过程中可能不稳定且生成的样本缺乏多样性。VAE 依赖于一个替代损失函数。Flow 模型需要采用专用架构来构建可逆变换。扩散模型受非平衡热力学启发,通过定义一个扩散步骤的马尔可夫链,逐步向数据中添加随机噪声,随后学习逆转扩散过程以从噪声中构建目标数据样本。与 VAE 或 Flow 模型不同,扩散模型采用固定流程进行学习,且潜在变量具有高维度(与原始数据相同)。
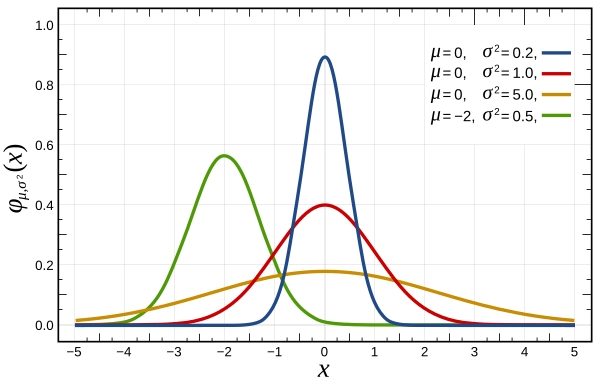
在开始教程之前,本文用了许多关于高斯分布(Gaussian distribution) 的函数的相关性质,先列在此处:
| 简写 | 中文 | 全称 | 公式 |
|---|---|---|---|
| Notation | 符号 | Normal distribution | $\mathcal{N}(\mu, \sigma^2)$ |
| Parameters | 参数 | Parameters: mean and variance | $\mu \in \mathbb{R}$, $\sigma^2 \in \mathbb{R}_{>0}$ |
| Support | 支持集 | Support of distribution | $x \in \mathbb{R}$ |
| 概率密度函数 | Probability Density Function | $\frac{1}{\sqrt{2 \pi \sigma^2}} e^{-\frac{(x-\mu)^2}{2 \sigma^2}}$ |
|
| CDF | 累积分布函数 | Cumulative Distribution Function | $\Phi\left(\frac{x-\mu}{\sigma}\right)=\frac{1}{2}\left[1+\operatorname{erf}\left(\frac{x-\mu}{\sigma \sqrt{2}}\right)\right]$ |
| Quantile | 分位数 | Quantile function | $\mu+\sigma \sqrt{2} \operatorname{erf}^{-1}(2p-1)$ |
| Mean | 均值 | Mean | $\mu$ |
| Median | 中位数 | Median | $\mu$ |
| Mode | 众数 | Mode | $\mu$ |
| Variance | 方差 | Variance | $\sigma^2$ |
| MAD | 平均绝对偏差 | Median Absolute Deviation | $\sigma \sqrt{2} \operatorname{erf}^{-1}(1 / 2)$ |
| AAD | 平均绝对离差 | Average Absolute Deviation | $\sigma \sqrt{2 / \pi}$ |
| Skewness | 偏度 | Skewness | $0$ |
| Excess kurtosis | 超额峰度 | Excess Kurtosis | $0$ |
| Entropy | 熵 | Differential Entropy | $\frac{1}{2} \log \left(2 \pi e \sigma^2\right)$ |
| Fisher information | Fisher 信息量 | Fisher Information Matrix | $\mathcal{I}(\mu, \sigma) = \begin{pmatrix} \frac{1}{\sigma^2} & 0 \\ 0 & \frac{2}{\sigma^2} \end{pmatrix}$ $\mathcal{I}(\mu, \sigma^2) = \begin{pmatrix} \frac{1}{\sigma^2} & 0 \\ 0 & \frac{1}{2\sigma^4} \end{pmatrix}$ |
| Kullback–Leibler divergence | KL 散度 | Kullback–Leibler Divergence | $\frac{1}{2} \left\{ \left(\frac{\sigma_0}{\sigma_1}\right)^2 + \frac{(\mu_1 - \mu_0)^2}{\sigma_1^2} - 1 + \ln \frac{\sigma_1^2}{\sigma_0^2} \right\}$ |
过程推导
前向过程
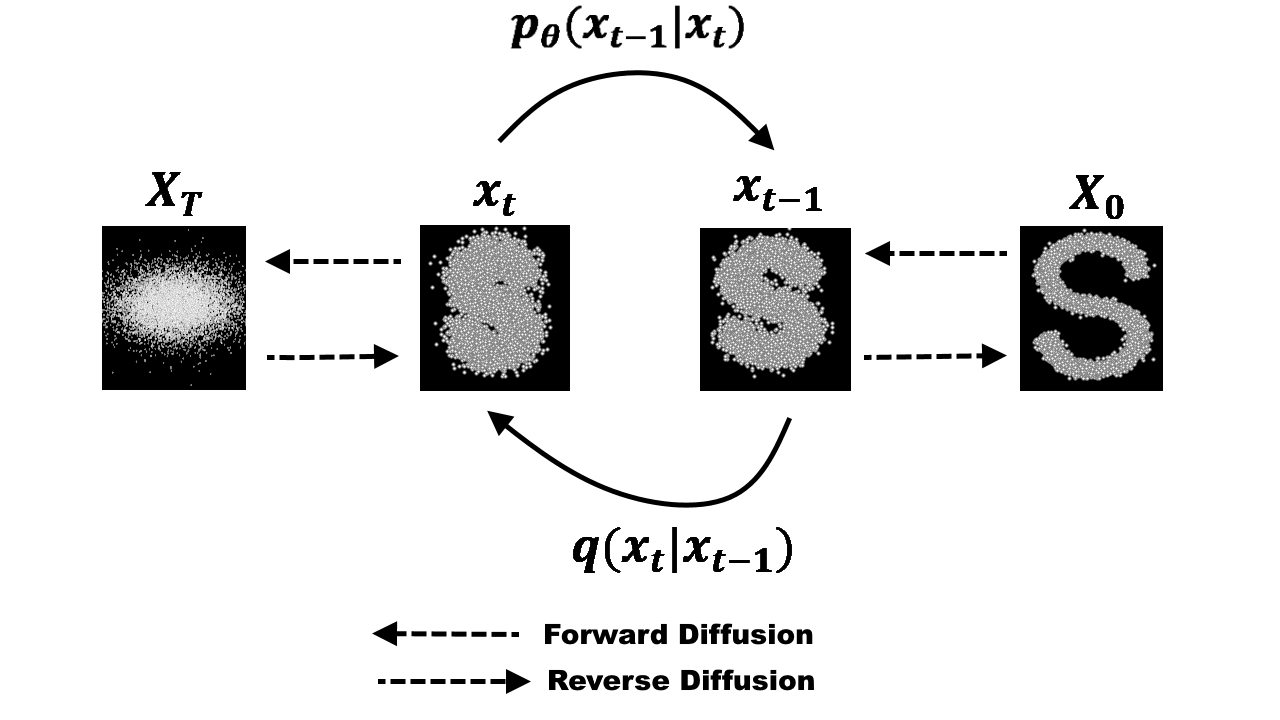
给定真实数据分布为 $\mathbf{x}_0 \sim q(\mathbf{x})$ 采样点,我们定义扩散模型的正向过程(Forward process),其中以步长为增量向样本中添加少量高斯噪声,通过给数据样本$x_0$逐步添加噪声使其生成一系列带有噪音的样本$\mathbf{x}_{1,},...,\mathbf{x}_T$,步长由方差时间表(variance schedule)控制,如式(1)所示,其中$\left\{\beta_t \in(0,1)\right\}_{t=1}^T$:

$$ \mathbf{x}_t=\sqrt{1-\beta_t} \mathbf{x}_{t-1}+\sqrt{\beta_t} \boldsymbol{\epsilon}, \quad \boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \mathbf{I}) \tag{1} $$
该过程可以被定义为一组条件概率序列,由于该过程是马尔可夫链(Markov chain),每个$x_t$仅依赖于前一步的$x_{t-1}$,不直接依赖于$x_0$或者早期步骤:
$$ \begin{split} & q\left(x_1, \ldots, x_T \mid x_0\right)=q\left(x_1 \mid x_0\right) q\left(x_2 \mid x_1, x_0\right) \ldots q\left(x_T \mid x_{T-1}, \ldots, x_0\right) \newline & q\left(x_1, \ldots, x_T \mid x_0\right)=q\left(x_1 \mid x_0\right) q\left(x_2 \mid x_1\right) \ldots q\left(x_T \mid x_{T-1}\right) \end{split} \tag{2} $$
整个的前向过程如下式(3)所示,数据样本$x_t$ 随着步长 $t$ 的增大,可辨识特征逐渐消失,最终当$T \rightarrow \infty$时,$x_T$等价于一个各向同性高斯分布。
$$ q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right):=\prod_{t=1}^T q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right), \quad q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right):=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{1-\beta_t} \mathbf{x}_{t-1}, \beta_t \mathbf{I}\right) \tag{3} $$
上述过程的一个优点是,我们可以使用重新参数化技巧
,以闭合形式在任意时间步长 $t$ 处采样 𝑥𝑡,这里令$\alpha_t=1-\beta_t$和$\bar{\alpha}_t=\prod_{i=1}^t \alpha_i$:
$$ \begin{split} \mathbf{x}_t=\sqrt{\alpha_t} \mathbf{x}_{t-1}+\sqrt{1-\alpha_t} \boldsymbol{\epsilon}_{t-1} \quad; \text { where } \boldsymbol{\epsilon}_{t-1}, \boldsymbol{\epsilon}_{t-2}, \cdots \sim \mathcal{N}(\mathbf{0}, \mathbf{I}) \end{split} \tag{4} $$
进一步地
$$ \mathbf{x}_t=\sqrt{\alpha_t \alpha_{t-1}} \mathbf{x}_{t-2}+\sqrt{1-\alpha_t \alpha_{t-1}} \bar{\epsilon}_{t-2} \quad ; \text { where } \bar{\epsilon}_{t-2} \text { merges two Gaussians }\left(^*\right) \tag{5} $$
最终
$$ \mathbf{x}_t=\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon} \tag{6} $$
因此式(3)变为:
$$ q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0,\left(1-\bar{\alpha}_t\right) \mathbf{I}\right) \tag{7} $$
(*)当合并两个方差不同的高斯分布时,$\mathcal{N}\left(\mathbf{0}, \sigma_1^2 \mathbf{I}\right)$ 和 $\mathcal{N}\left(\mathbf{0}, \sigma_2^2 \mathbf{I}\right)$,新的分布是 $\mathcal{N}\left(\mathbf{0},\left(\sigma_1^2+\sigma_2^2\right) \mathbf{I}\right)$。这里的方差应该是 $\sqrt{\left(1-\alpha_t\right)+\alpha_t\left(1-\alpha_{t-1}\right)}=\sqrt{1-\alpha_t \alpha_{t-1}}$。通常,当样本噪声增大时,我们可以采用更大的更新步长,因此 $\beta_1<\beta_2<\cdots<\beta_T$ , $\bar{\alpha}_1>\cdots>\bar{\alpha}_T$。
逆向过程
如果我们能够逆转上述过程,并从$q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}\right)$中采样,我们将能够从高斯噪声输入$\quad \boldsymbol{x_T} \sim (\mathbf{0}, \mathbf{I})$ 中重建真实样本。需要注意的是,如果 $\beta_t$足够小, $q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}\right)$也将服从高斯分布。遗憾的是,我们无法直接估计$q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}\right)$ ,因为它需要使用整个数据集,因此我们需要学习一个模型$p_\theta$来近似这些条件概率,以便运行逆向扩散过程。
$$ p_\theta\left(\mathbf{x}_{0: T}\right):=p\left(\mathbf{x}_T\right) \prod_{t=1}^T p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right), \quad p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right):=\mathcal{N}\left(\mathbf{x}_{t-1} ; \boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right), \mathbf{\Sigma}_\theta\left(\mathbf{x}_t, t\right)\right) \tag{8} $$
值得注意的是,当条件为$x_0$时,逆条件概率是可计算的:
$$ q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \tilde{\boldsymbol{\mu}}\left(\mathbf{x}_t, \mathbf{x}_0\right), \tilde{\beta}_t \mathbf{I}\right) $$
使用贝叶斯法则和高斯概率密度分布函数,可以得到:
$$ \mathcal{N}\left(\mathbf{x} ; \mu, \sigma^2 \mathbf{I}\right) \propto \exp \left(-\frac{1}{2 \sigma^2}\|\mathbf{x}-\mu\|^2\right) $$
$$ \begin{aligned} q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) & =q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}, \mathbf{x}_0\right) \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)} \\ & \propto \exp \left(-\frac{1}{2}\left(\frac{\left(\mathbf{x}_t-\sqrt{\alpha_t} \mathbf{x}_{t-1}\right)^2}{\beta_t}+\frac{\left(\mathbf{x}_{t-1}-\sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_{t-1}}-\frac{\left(\mathbf{x}_t-\sqrt{\bar{\alpha}_t} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_t}\right)\right) \\ & =\exp \left(-\frac{1}{2}\left(\frac{\mathbf{x}_t^2-2 \sqrt{\alpha_t} \mathbf{x}_t \mathbf{x}_{t-1}+\alpha_t \mathbf{x}_{t-1}^2}{\beta_t}+\frac{\mathbf{x}_{t-1}^2-2 \sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_0 \mathbf{x}_{t-1}+\bar{\alpha}_{t-1} \mathbf{x}_0^2}{1-\bar{\alpha}_{t-1}}-\frac{\left(\mathbf{x}_t-\sqrt{\bar{\alpha}_t} \mathbf{x}_0\right)^2}{1-\bar{\alpha}_t}\right)\right) \\ & =\exp \left(-\frac{1}{2}\left(\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right) \mathbf{x}_{t-1}^2-\left(\frac{2 \sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{2 \sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) \mathbf{x}_{t-1}+C\left(\mathbf{x}_t, \mathbf{x}_0\right)\right)\right) \end{aligned} $$
上式可进一步转化为:
$$ \exp \left(-\frac{1}{2}\left[A \cdot \mathbf{x}_{t-1}^2-B \cdot \mathbf{x}_{t-1}+C\left(\mathbf{x}_t, \mathbf{x}_0\right)\right]\right) $$
其中 $C\left(\mathbf{x}_t, \mathbf{x}_0\right)$是某个不涉及$\mathbf{x}_{t-1}$的函数,具体细节省略。遵循标准高斯密度函数,根据高斯分布的标准性质,均值就是线性项系数的负值除以二次项系数,高斯分布的方差是二次项系数 A 的倒数,均值和方差可参数化为如下形式($\alpha_t=1-\beta_t$和$\bar{\alpha}_t=\prod_{i=1}^t \alpha_i$):
$$ \begin{aligned} \tilde{\beta}_t & =1 /\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right)=1 /\left(\frac{\alpha_t-\bar{\alpha}_t+\beta_t}{\beta_t\left(1-\bar{\alpha}_{t-1}\right)}\right)=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t \\ \tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right) & =\left(\frac{\sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) /\left(\frac{\alpha_t}{\beta_t}+\frac{1}{1-\bar{\alpha}_{t-1}}\right) \\ & =\left(\frac{\sqrt{\alpha_t}}{\beta_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}} \mathbf{x}_0\right) \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t \\ & =\frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t} \mathbf{x}_0 \end{aligned} $$
由于该性质,我们可以将式(6)表示为$\mathbf{x}_0=\frac{1}{\sqrt{\bar{\alpha}_t}}\left(\mathbf{x}_t-\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t\right)$ 并将它代入上述方程,得到:
$$ \begin{aligned} \tilde{\boldsymbol{\mu}}_t & =\frac{\sqrt{\alpha_t}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_t} \mathbf{x}_t+\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t} \frac{1}{\sqrt{\bar{\alpha}}_t}\left(\mathbf{x}_t-\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t\right) \\ & =\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \epsilon_t\right) \end{aligned} $$
最大似然估计
方法一
这种设置与变分自编码器(VAE)非常相似,因此我们可以使用变分下界来优化负对数似然函数:
$$ \begin{aligned} -\log p_\theta\left(\mathbf{x}_0\right) & \leq-\log p_\theta\left(\mathbf{x}_0\right)+D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)\right) \\ & =-\log p_\theta\left(\mathbf{x}_0\right)+\mathbb{E}_{\mathbf{x}_{1: T} \sim q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right) / p_\theta\left(\mathbf{x}_0\right)}\right] \\ & =-\log p_\theta\left(\mathbf{x}_0\right)+\mathbb{E}_q\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right)}+\log p_\theta\left(\mathbf{x}_0\right)\right] \\ & =\mathbb{E}_q\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right)}\right] \end{aligned} $$
其中,KL 散度是非负的
$$ \text { Let } L_{\mathrm{VLB}}=\mathbb{E}_{q\left(\mathbf{x}_{0: T}\right)}\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right)}\right] \geq-\mathbb{E}_{q\left(\mathbf{x}_0\right)} \log p_\theta\left(\mathbf{x}_0\right) $$
方法二
使用杰森不等式(Jensen’s inequality)同样可以轻松获得它的证据下限(Evidence Lower Bound,ELBO),假设我们希望将交叉熵(cross entropy)作为学习目标进行最小化:
$$ \begin{aligned} L_{\mathrm{CE}} & =-\mathbb{E}_{q\left(\mathbf{x}_0\right)} \log p_\theta\left(\mathbf{x}_0\right) \\ & =-\mathbb{E}_{q\left(\mathbf{x}_0\right)} \log \left(\int p_\theta\left(\mathbf{x}_{0: T}\right) d \mathbf{x}_{1: T}\right) \\ & =-\mathbb{E}_{q\left(\mathbf{x}_0\right)} \log \left(\int q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right) \frac{p_\theta\left(\mathbf{x}_{0: T}\right)}{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)} d \mathbf{x}_{1: T}\right) \\ & =-\mathbb{E}_{q\left(\mathbf{x}_0\right)} \log \left(\mathbb{E}_{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)} \frac{p_\theta\left(\mathbf{x}_{0: T}\right)}{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}\right) \\ & \leq-\mathbb{E}_{q\left(\mathbf{x}_{0: T}\right)} \log \frac{p_\theta\left(\mathbf{x}_{0: T}\right)}{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)} \\ & =\mathbb{E}_{q\left(\mathbf{x}_{0: T}\right)}\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right)}\right]=L_{\mathrm{VLB}} \end{aligned} $$
公式简化
为了将方程中的每个项转换为可解析计算的形式,目标函数可以进一步重写为几个 KL 散度和熵项的组合(详见 Sohl-Dickstein 等,2015 年附录 B 中的详细分步过程):
$$ \begin{aligned} L_{\mathrm{VLB}} & =\mathbb{E}_{q\left(\mathbf{x}_{0: T}\right)}\left[\log \frac{q\left(\mathbf{x}_{1: T} \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{0: T}\right)}\right] \\ & =\mathbb{E}_q\left[\log \frac{\prod_{t=1}^T q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)}{p_\theta\left(\mathbf{x}_T\right) \prod_{t=1}^T p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}\right] \\ & =\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=1}^T \log \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}\right] \\ & =\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ & =\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \left(\frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)} \cdot \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}\right)+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ & =\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_0\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ & =\mathbb{E}_q\left[-\log p_\theta\left(\mathbf{x}_T\right)+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}+\log \frac{q\left(\mathbf{x}_T \mid \mathbf{x}_0\right)}{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}+\log \frac{q\left(\mathbf{x}_1 \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}\right] \\ & =\mathbb{E}_q\left[\log \frac{q\left(\mathbf{x}_T \mid \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_T\right)}+\sum_{t=2}^T \log \frac{q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)}{p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)}-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)\right] \\ & = \mathbb{E}_q[\underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_T\right)\right)}_{L_T}+\sum_{t=2}^T \underbrace{D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right)}_{L_{t-1}} \underbrace{-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)}_{L_0}] \end{aligned} $$
让我们分别标记变分下界损失中的每个部分:
$$ \begin{aligned} L_{\mathrm{VLB}} & =L_T+L_{T-1}+\cdots+L_0 \\ \text { where } L_T & =D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_T\right)\right) \\ L_t & =D_{\mathrm{KL}}\left(q\left(\mathbf{x}_t \mid \mathbf{x}_{t+1}, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_t \mid \mathbf{x}_{t+1}\right)\right) \text { for } 1 \leq t \leq T-1 \\ L_0 & =-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right) \end{aligned} $$
$L_{\text {VLB }}$ 中的每个 KL 项(除 $L_0$ 外)都比较两个高斯分布,因此它们可以以闭合形式
计算。$L_T$ 是常数,可以在训练过程中忽略,因为 $q$ 没有可学习参数,且 $\mathbf{x}_T$ 是高斯噪声。Ho 等 2020 年
模型使用一个独立的离散解码器来表示 $L_0$,该解码器由 $\mathcal{N}\left(\mathbf{x}_0 ; \boldsymbol{\mu}_\theta\left(\mathbf{x}_1, 1\right), \boldsymbol{\Sigma}_\theta\left(\mathbf{x}_1, 1\right)\right)$ 派生而来。
KL 散度(Kullback-Leibler divergence )是一种衡量两个概率分布接近程度的方法,可以想象为概率空间一种距离度量,上式中第一项$D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p\left(\mathbf{x}_T\right)\right)$不依赖于模型的参数$\theta$,可以忽略,整个模型发现过程有上千步,最后一项表示从到图像$x_1$图像$x_0$,模型已经恢复了绝大部分的图像,因此这一项很小可以忽略,最终只剩下中间项。
$$ \mathbb{E}_q\left[D_{\mathrm{KL}}\left(q\left(\mathbf{x}_T \mid \mathbf{x}_0\right) \| p\left(\mathbf{x}_T\right)\right)+\sum_{t>1} D_{\mathrm{KL}}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right) \| p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)\right)-\log p_\theta\left(\mathbf{x}_0 \mid \mathbf{x}_1\right)\right] $$
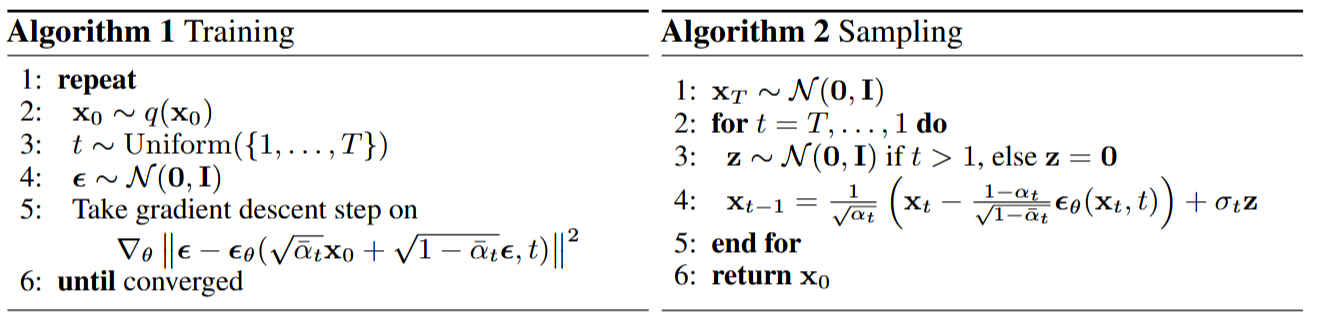
训练损失
我们需要学习一个神经网络来近似逆扩散过程中的条件概率分布,$p_\theta\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right), \boldsymbol{\Sigma}_\theta\left(\mathbf{x}_t, t\right)\right)$。我们希望训练 $\boldsymbol{\mu}_\theta$ 以预测 $\tilde{\boldsymbol{\mu}}_t=\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_t\right)$。由于 $\mathbf{x}_t$ 在训练时可作为输入,因此我们可以重新参数化高斯噪声项,使其预测时间步 $t$ 时输入 $\mathbf{x}_t$ 的 $\boldsymbol{\epsilon}_t$:
$$ \begin{aligned} \boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right) & =\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \epsilon_\theta\left(\mathbf{x}_t, t\right)\right) \\ \text { Thus } \mathbf{x}_{t-1} & =\mathcal{N}\left(\mathbf{x}_{t-1} ; \frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right), \mathbf{\Sigma}_\theta\left(\mathbf{x}_t, t\right)\right) \end{aligned} $$
损失项$L_t$ 通过参数化来最小化与 $\tilde{\boldsymbol{\mu}}$ 的差异:
$$ \begin{aligned} L_t & =\mathbb{E}_{\mathbf{x}_0, \boldsymbol{\epsilon}}\left[\frac{1}{2\left\|\boldsymbol{\Sigma}_\theta\left(\mathbf{x}_t, t\right)\right\|_2^2}\left\|\tilde{\boldsymbol{\mu}}_t\left(\mathbf{x}_t, \mathbf{x}_0\right)-\boldsymbol{\mu}_\theta\left(\mathbf{x}_t, t\right)\right\|^2\right] \\ & =\mathbb{E}_{\mathbf{x}_0, \boldsymbol{\epsilon}}\left[\frac{1}{2\left\|\boldsymbol{\Sigma}_\theta\right\|_2^2}\left\|\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_t\right)-\frac{1}{\sqrt{\alpha_t}}\left(\mathbf{x}_t-\frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right)\right\|^2\right] \\ & =\mathbb{E}_{\mathbf{x}_0, \boldsymbol{\epsilon}}\left[\frac{\left(1-\alpha_t\right)^2}{2 \alpha_t\left(1-\bar{\alpha}_t\right)\left\|\boldsymbol{\Sigma}_\theta\right\|_2^2}\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right\|^2\right] \\ & =\mathbb{E}_{\mathbf{x}_0, \boldsymbol{\epsilon}}\left[\frac{\left(1-\alpha_t\right)^2}{2 \alpha_t\left(1-\bar{\alpha}_t\right)\left\|\boldsymbol{\Sigma}_\theta\right\|_2^2}\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t, t\right)\right\|^2\right] \end{aligned} $$
重参数化(Reparameterization)
实证研究表明,Ho 等(2020) 发现,在训练扩散模型时,采用一个简化的目标函数(忽略权重项)效果更好:
$$ \begin{aligned} L_t^{\text {simple }} & =\mathbb{E}_{t \sim[1, T], \mathbf{x}_0, \epsilon_t}\left[\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right\|^2\right] \\ & =\mathbb{E}_{t \sim[1, T], \mathbf{x}_0, \epsilon_t}\left[\left\|\boldsymbol{\epsilon}_t-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}_t, t\right)\right\|^2\right] \end{aligned} $$
因此最终损失函数(Final loss function):
$$ L_{\text {simple }}=L_t^{\text {simple }}+C $$
其中$C$是常数,不依赖于参数$\theta$
参数$\beta_t$
在Ho 等(2020)
的研究中,前向方差被设置为一个线性递增的常数序列,从$\beta_1=10^{-4}$到$\beta_T=0.02$。与归一化图像像素值的范围$[-1,1]$相比,这些值相对较小。他们在实验中使用的扩散模型虽然生成了高质量的样本,但仍无法达到其他生成模型那样的竞争性模型对数似然值。
Nichol & Dhariwal(2021)
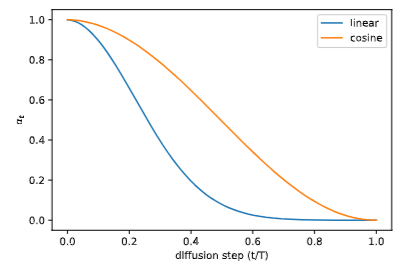
提出了几种改进技术,以帮助扩散模型获得更低的负对数似然(NLL)。其中一种改进是使用基于余弦的方差调度方案。调度函数的选择可以任意,只要它在训练过程中提供近线性下降,并在 $t=0$ 和 $t=T$ 附近有细微变化。
$$ \beta_t=\operatorname{clip}\left(1-\frac{\bar{\alpha}_t}{\bar{\alpha}_{t-1}}, 0.999\right) \quad \bar{\alpha}_t=\frac{f(t)}{f(0)} \quad \text { where } f(t)=\cos \left(\frac{t / T+s}{1+s} \cdot \frac{\pi}{2}\right)^2 $$
其中,小偏移量 $s$ 用以防止 $\beta_t$ 在接近 $t=0$ 时过小,下图
是 $\bar{\alpha}_t$ 在线性时间表和我们提出的余弦时间表中的变化情况。
逆向过程方差 $\boldsymbol{\Sigma}_\theta$ 参数化
Ho 等(2020)
选择将 $\beta_t$ 固定为常量而非可学习参数,并设定 $\boldsymbol{\Sigma}_\theta\left(\mathbf{x}_t, t\right)=\sigma_t^2 \mathbf{I}$,其中$\sigma_t$不是学习得到的,而是设置为$\beta_t$或$\tilde{\beta}_t=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \cdot \beta_t$。因为他们发现学习对角方差 $\boldsymbol{\Sigma}_\theta$ 会导致训练不稳定和样本质量较差。
Nichol & Dhariwal (2021)
提出学习 $\boldsymbol{\Sigma}_\theta\left(\mathbf{x}_t, t\right)$ 作为 $\beta_t$ 和 $\tilde{\beta}_t$ 之间的插值,通过模型预测一个混合向量 $\mathbf{v}$:
$$ \boldsymbol{\Sigma}_\theta\left(\mathbf{x}_t, t\right)=\exp \left(\mathbf{v} \log \beta_t+(1-\mathbf{v}) \log \tilde{\beta}_t\right) $$
然而,简单的目标函数 $L_{\text {simple }}$ 不依赖于 $\boldsymbol{\Sigma}_\theta$。为了添加这种依赖性,他们构造了一个混合目标函数 $L_{\text {hybrid }}=L_{\text {simple }}+\lambda L_{\text {VLB }}$,其中 $\lambda=0.001$ 是较小的常数,用于在 $L_{\mathrm{VLB}}$ 项中停止梯度对 $\boldsymbol{\mu}_\theta$ 的收敛,确保 $L_{\mathrm{VLB}}$ 仅引导 $\boldsymbol{\Sigma}_\theta$ 的学习。实验中他们观察到 $L_{\text {VLB }}$ 优化难度较大,这可能与梯度噪声有关,因此他们提出使用带重要性采样的 $L_{\mathrm{VLB}}$ 的时间平均平滑版本。
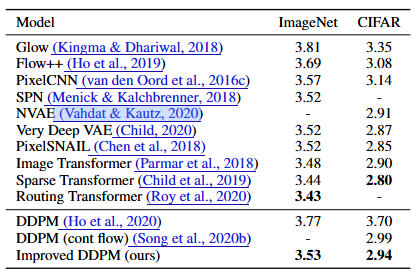
下表是 DDPMs 与其他基于似然度的模型在 CIFAR-10 和无条件 ImageNet $64 \times 64$上的比较。非零损失(NLL)以位/维度报告。在 ImageNet $64 \times 64$上,我们的模型与最佳卷积模型具有竞争力,但比基于 Transformer 架构的差一些。
条件生成(Conditioned Generation)
在使用包含条件信息的图像数据集(如 ImageNet 数据集)训练生成式模型时,常见的做法是生成基于类标签或一段描述性文本的条件样本。
分类器引导扩散(Classifier Guided Diffusion)
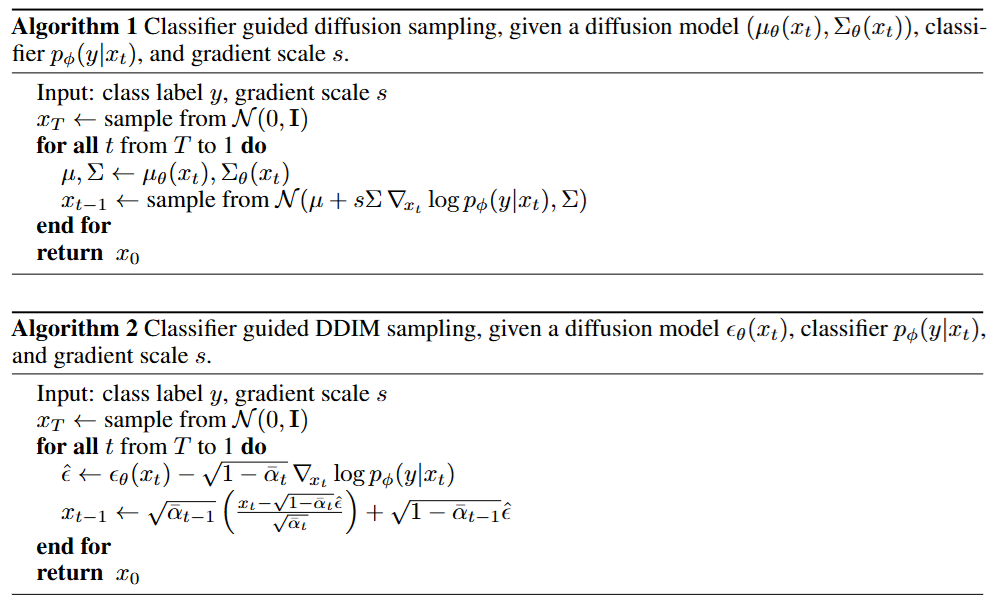
为了显式地将类信息融入扩散过程,Dhariwal 和 Nichol(2021)
训练了一个分类器 $f_\phi\left(y \mid \mathbf{x}_t, t\right)$,并利用梯度 $\nabla_{\mathbf{x}} \log f_\phi\left(y \mid \mathbf{x}_t\right)$ 引导扩散采样过程向条件信息 $y$(例如目标类标签)收敛,通过调整噪声预测实现这一目标。回顾一下,$\nabla_{\mathbf{x}_t} \log q\left(\mathbf{x}_t\right)=-\frac{1}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)$,我们可以将联合分布 $q\left(\mathbf{x}_t, y\right)$ 的评分函数如下:
$$ \begin{aligned} \nabla_{\mathbf{x}_t} \log q\left(\mathbf{x}_t, y\right) & =\nabla_{\mathbf{x}_t} \log q\left(\mathbf{x}_t\right)+\nabla_{\mathbf{x}_t} \log q\left(y \mid \mathbf{x}_t\right) \\ & \approx-\frac{1}{\sqrt{1-\bar{\alpha}_t}} \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)+\nabla_{\mathbf{x}_t} \log f_\phi\left(y \mid \mathbf{x}_t\right) \\ & =-\frac{1}{\sqrt{1-\bar{\alpha}_t}}\left(\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)-\sqrt{1-\bar{\alpha}_t} \nabla_{\mathbf{x}_t} \log f_\phi\left(y \mid \mathbf{x}_t\right)\right) \end{aligned} $$
因此,一个新的分类器指导的预测器$\overline{\boldsymbol{\epsilon}}_\theta$将转为如下形式:
$$ \overline{\boldsymbol{\epsilon}}_\theta\left(\mathbf{x}_t, t\right)=\boldsymbol{\epsilon}_\theta\left(x_t, t\right)-\sqrt{1-\bar{\alpha}_t} \nabla_{\mathbf{x}_t} \log f_\phi\left(y \mid \mathbf{x}_t\right) $$
为了控制分类器引导的强度,我们可以添加一个权重$\boldsymbol{w}$,
$$ \overline{\boldsymbol{\epsilon}}_\theta\left(\mathbf{x}_t, t\right)=\boldsymbol{\epsilon}_\theta\left(x_t, t\right)-\sqrt{1-\bar{\alpha}_t} w \nabla_{\mathbf{x}_t} \log f_\phi\left(y \mid \mathbf{x}_t\right) $$
所得的消融扩散模型(ablated diffusion model,ADM)以及带有额外分类器指导的(ADM-G)能够取得比当前最先进生成模型(如 BigGAN)更优的结果。
此外,通过对 U-Net 架构进行一些修改,Dhariwal & Nichol(2021)
展示了其性能优于基于扩散模型的生成对抗网络(GAN)。架构修改包括增加模型深度/宽度、增加注意力头数量、多尺度注意力、使用 BigGAN 残差块进行上采样/下采样、通过$1 / \sqrt{2}$进行残差连接缩放,以及自适应组归一化(AdaGN)。
无分类器引导扩散(Classifier-Free Guidance)
在没有独立分类器 $f_\phi$ 的情况下,仍可通过整合条件扩散模型与无条件扩散模型的评分,实现条件扩散步骤(Ho & Salimans, 2021)
。令无条件去噪扩散模型 $p_\theta(\mathbf{x})$ 通过分数估计器 $\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)$ 参数化,条件模型 $p_\theta(\mathbf{x} \mid y)$ 通过 $\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)$ 参数化。这两个模型可以通过单个神经网络学习。具体来说,条件扩散模型 $p_\theta(\mathbf{x} \mid y)$ 在配对数据 ($\mathbf{x}, y$) 上进行训练,其中条件信息 $y$ 会被随机丢弃,使得模型能够生成无条件图像,即$\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)=\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y=\varnothing\right)$
隐式分类器的梯度可通过条件和无条件分数估计器表示。一旦将这些估计器插入分类器引导的修改后分数中,该分数不再依赖于独立的分类器。
$$ \begin{aligned} \nabla_{\mathbf{x}_t} \log p\left(y \mid \mathbf{x}_t\right) & =\nabla_{\mathbf{x}_t} \log p\left(\mathbf{x}_t \mid y\right)-\nabla_{\mathbf{x}_t} \log p\left(\mathbf{x}_t\right) \\ & =-\frac{1}{\sqrt{1-\bar{\alpha}_t}}\left(\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right) \\ \overline{\boldsymbol{\epsilon}}_\theta\left(\mathbf{x}_t, t, y\right) & =\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)-\sqrt{1-\bar{\alpha}_t} w \nabla_{\mathbf{x}_t} \log p\left(y \mid \mathbf{x}_t\right) \\ & =\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)+w\left(\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)-\boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right)\right) \\ & =(w+1) \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t, y\right)-w \boldsymbol{\epsilon}_\theta\left(\mathbf{x}_t, t\right) \end{aligned} $$
他们的实验表明,无分类器引导方法能够在 FID(区分合成图像与生成图像)和 IS(图像质量与多样性)之间实现良好的平衡。
引导扩散模型 GLIDE(Nichol、Dhariwal & Ramesh 等,2022) 探索了两种引导策略:CLIP 引导和无分类器引导,并发现后者更受青睐。他们假设这是因为 CLIP 引导通过利用针对 CLIP 模型的对抗样本来提升模型性能,而非优化生成更匹配的图像。
模型架构
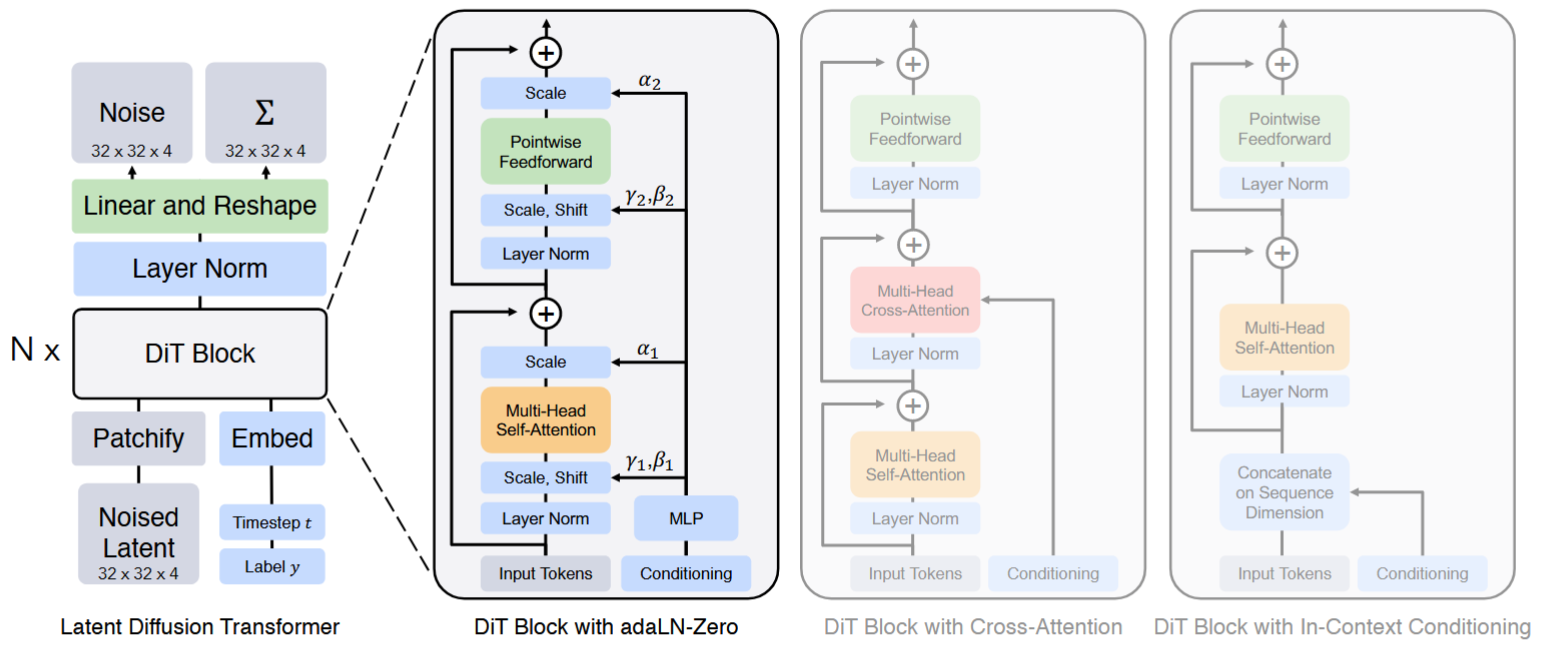
Diffusion Transformer (DiT; Peebles & Xie,2023 )是一种用于扩散建模的模型,其操作对象为潜在像素块,与潜在扩散模型(LDM)共享相同的潜在空间。DiT 的具体架构如下:
-
将输入
$\mathbf{z}$的潜在表示作为输入传递给 DiT。 -
将噪声潜在表示(尺寸为
$I \times I \times C$)划分为尺寸为$p$的补丁,并将其转换为尺寸为$(I / p)^2$的补丁序列。 -
然后,这组令牌序列通过 Transformer 块进行处理。他们探索了三种不同的设计,用于在上下文信息(如时间步
$t$或类标签$c$)条件下进行生成。在三种设计中,adaLN(自适应层规范)-Zero 表现最佳,优于上下文条件化和交叉注意力块。尺度和偏移参数$\gamma$和$\beta$通过$t$和$c$的嵌入向量之和进行回归。维度缩放参数$\alpha$同样通过回归获得,并在 DiT 块内的残差连接之前立即应用。 -
Transformer 解码器输出噪声预测和输出对角协方差预测。
Transformer 架构具有良好的可扩展性,这一点广为人知。这是 DiT 的最大优势之一,因为其性能会随着计算资源的增加而提升,且实验表明,更大的 DiT 模型在计算效率上也更优。
📖 参考文献
- Denoising Diffusion Probabilistic Models | DDPM Explained - YouTube
- Diffusion Models: DDPM | Generative AI Animated - YouTube
- Denoising Diffusion Probabilistic Models
- Deep Unsupervised Learning using Nonequilibrium Thermodynamics
- What are Diffusion Models? | Lil’Log
- Score-Based Generative Modeling through Stochastic Differential Equations
- Deep Unsupervised Learning using Nonequilibrium Thermodynamics
- 生成扩散模型漫谈(三):DDPM = 贝叶斯 + 去噪 - 科学空间|Scientific Spaces
- Generative Modeling by Estimating Gradients of the Data Distribution | Yang Song
- [2105.05233] Diffusion Models Beat GANs on Image Synthesis
- Classifier-Free Diffusion Guidance | OpenReview
- Diffusion and Score-Based Generative Models - YouTube